道具使用の熟達過程における運動学的変化が明らかに -リハビリ・義手・VR環境などの応用を見据えて-
静岡大学情報学部の板口典弘助教は、物体に手を伸ばす運動を検討することによって、道具使用の熟達過程において生じる運動学的変化を明らかにしました。これまで、手などの身体を使用する際と道具を使用する際では、物を掴むなど同じ動作をしたとしても、その運動学的特徴が大きく異なることが知られていました。この違いから、脳内での身体動作に関する処理と道具使用動作に関する処理は異なるものであると考えられてきました。しかしながら一方で、私たちは使い慣れた道具を“身体のように”感じ、操ることができます。このような“道具の身体化”メカニズムを明らかにするために、本研究で、モノを掴む動作を運動学的に検討しました。実験の結果、道具使用の習熟につれて協調的な運動が実現されるようになり、道具先端の動きも指のような動きに近づいていくことが明らかとなりました。この結果、脳内における身体と道具の運動制御原理は根本的に同じであることを示唆します。学習による到達把持運動の変化を速度・精度の観点から考慮し解析した研究は世界初です。本研究成果は、脳内の計算メカニズム解明だけでなく、脳損傷患者への効率的なリハビリ提案、使いやすい義手・遠隔操作ロボット・ヴァーチャルリアリティ環境の開発など、幅広い社会応用が期待されます。
本研究成果は、米国のAmerican Physiological Societyの発行する科学ジャーナル「Journal of Neurophysiology」に2020年4月22日にオンラインで先行掲載されました。
【ポイント】
・“道具と身体”の関係を運動学的に検討した
・道具使用の習熟によって、身体を使用するような運動制御が獲得されることを明らかにした
・学習による到達把持運動の変化を速度・精度の観点から考慮し、解析した研究は世界初である
・脳損傷患者への効率的なリハビリ提案、使いやすい義手・遠隔操作ロボット・ヴァーチャルリアリティ環境への開発など、
幅広い社会応用が期待される
【研究背景】
これまで、手などの身体を使用する際と道具を使用する際では、物を掴むなど同じ動作をしたとしても、その運動学的特徴が大きく異なることが知られていました。この違いから、脳内での身体動作に関する処理と道具使用動作に関する処理は異なるものであると考えられてきました。しかしながら一方で、私たちは使い慣れた道具を“身体のように”感じ、操ることができます。
このような“道具の身体化”は知覚の側面において多く研究されてきましたが、運動制御の側面についての研究は多くはありません。また、“道具の身体化という概念は、そもそも身体と道具を独立のものと仮定していますが、この仮定が妥当かどうかも不明です。そこで本研究は、道具と身体に関する運動制御メカニズムを明らかにするために、道具でも身体でも実行可能な“モノを掴む動作”に着目し、その特徴を運動学的に検討しました。
【研究の方法と成果】
本研究では全部で3つの実験がおこなわれました。実験では、はさみ状の新規な道具(図1)を使用した到達把持運動(物体に対して手を伸ばす運動)を対象に、異なる熟達度・要求精度における運動学的特徴を検討しました。具体的には、道具使用の学習につれて身体(手)に近い運動が実現されるのか(実験1)、およびそもそも何が道具使用特有の運動学的特徴を生むのか(実験2・3)を調べました。
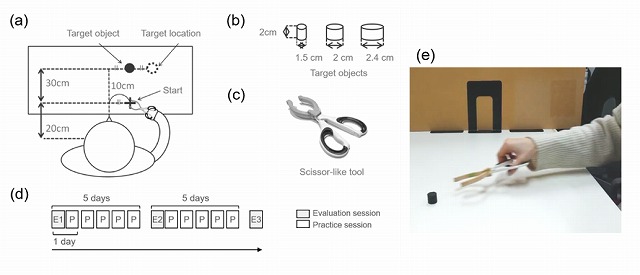
図1.実験環境を上から見た図 (a),ターゲット物体 (b),把持に使用した新規道具 (c),
実験1のスケジュール(d),到達把持運動の様子(e).
主たる運動学的指標として、Plateau durationと呼ばれる、効果器先端の開き幅が一定以上開いて変化が乏しい期間を算出し、協調的運動の達成度の度合いとして使用しました(図2a, b参照)。Plateau durationが長いほどUFOキャッチャーのような到達把持運動(最初に開いて、移動し、最後に閉じる)になっており、協調的な動作ができていないことを示します。逆にPlateau durationが短いほど滑らかで協調的な動作が実現されていることを示します。
実験1の結果、道具使用の習熟につれて協調的な運動が実現されるようになり、道具先端の動きも指のような動きに近づいていくことが明らかとなりました(図2c)。この結果は、脳内における身体と道具の運動制御原理は根本的に同じであることを示唆します。さらに、実験2と3の結果、道具使用の練習を全くしなくても、実験的に動作の要求精度を落とすことによってPlateau durationの短縮、すなわちなめらかで協調的な把持動作が可能であることも示されました。このことは、道具を使用した把持における運動学的特徴は、把持成功率を高めるための無意識的な戦略によって敢えて用いられたものであり、道具と身体の把持運動の計算原理は共通であるという考えを支持します。
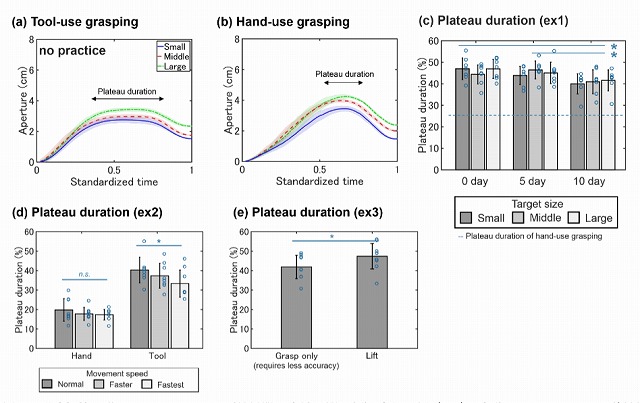
図2.到達把持運動におけるaperture(効果器の先端の開き幅)変化の例 (a, b)、
実験1・2・3における道具使用把持におけるplateau duration (c-e).
実験1と3は道具使用時のPlateau durationのみが示してある。図中のエラーバーは標準偏差、
小さいプロットは各参加者のスコア、*は統計的有意差を示す。
【今後の展開】
本研究では、到達把持運動という基礎的な動作を対象にして、道具と身体の関係を運動学的な観点から検討しました。本研究成果は、脳内の計算メカニズム解明だけでなく、様々な社会応用が期待されます。ひとつの目標は、脳損傷によってうまく物を掴めなくなった患者さんに対する効率的なリハビリ方法の提案です。また、義手、通信遅延を伴う遠隔操作ロボット、ヴァーチャルリアリティ環境においても、なめらかさの欠落した“道具的”な把持が生じることが知られており、本知見はこれらに対する解決技術の開発にも大きく寄与すると考えられます。
【論文情報】
掲載誌:
Journal of Neurophysiology
論文タイトル:
Toward natural grasping with a tool: effects of practice and required accuracy on the kinematics of tool-use grasping
著者:
Yoshihiro Itaguchi(板口典弘)
DOI:
10.1152/jn.00384.2019
【研究に関する問い合わせ】
〒432-8011 浜松市中区城北3丁目5-1 静岡大学情報学部情報科学科
itaguchi-y[at]inf.shizuoka.ac.jp ※[at]を@に変更して下さい
053-478-1459
板口典弘